NASA의 우주탐사 휴머노이드 로봇 발키리
NASA는 인간의 안전한 우주탐사를 위해 휴머노이드 로봇 발키리를 개발하고 있습니다. 그 동안 NASA는 달이나 화성 등 탐사로봇은 바퀴가 달린 로버형태로 개발하여 성공적으로 임무를 수행하긴 했지만 움직임은 매우 제한적이었습니다. 인간이 적응하기 어려운 우주 환경에서도 로봇이 원활하게 임무를 수행할 수 있도록 휴머노이드 형으로 개발중인 발키리는 2030년 아르테미스 미션 등 앞으로 우주개발에 활용할 예정입니다.
목차
NASA의 휴머노이드 로봇 발키리
발키리는 NASA의 휴머노이드형 로봇입니다. 북유럽 신화에서 발키리는 전사로 chooser of the Slain(살해당할 자를 선택하는 자 정도로 해석됩니다)을 의미합니다. 아마도 인간이 적응하기 어려운 위험한 환경에서도 로봇이 원활하게 임무를 수행할 수 있도록 강한 의미의 이름이 붙여진 듯 합니다.
NASA는 인간이 위험한 환경에서 중요한 작업을 수행하도록 개발중이며, 2030년 아르테미스 미션에도 발키리가 사용되기를 희망하고 있습니다. 아울러 우주공간에서 우주비행사가 물리적으로 존재하지 않더라도 발키리가 성공적으로 사용되길 계획하고 있습니다.
발키리 성능
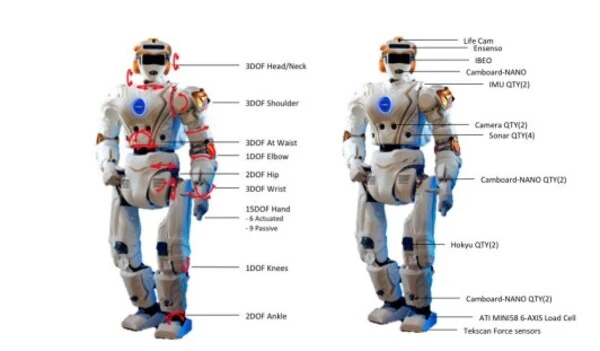
발키리는 신장 189cm, 무게 136kg의 휴머노이드 형 로봇으로 사람의 동작을 따라하기 위해 다양한 컴퓨터, 센서 및 전기, 유압, 기압 등으로 작동하는 다양한 액츄에이터가 장착되어 있습니다.
미국 플로리다의 인간·기계 인지 연구소(IHMC)에서 개발한 보행 알고리즘을 사용하여 움직이며, 머리에는 미국의 카네기로보틱스에서 개발한 멀티센스 SL 센서가 장착되어 있습니다. 이 센서는 레이저 및 원근을 판독할 수 있는 스테레오 카메라로 구성되어 있어 발키리가 거리를 측정할 수 있도록 돕습니다.
몸통에는 컴퓨터, 전원장치 및 전방과 후방의 위협 및 관성을 감지할 수 있는 카메라가 장착되어 있으며, 몸통과 골반 사이에는 회전이 가능하도록 2개의 액추에이터도 장착되어 있습니다.
팔과 다리의 섬세한 임무를 수행하기 위해 많은 액츄에이터와 관절이 조합되어 있습니다. 다리는 총 7개의 액츄에이터와 2개의 관절로 구성되어 있으며, 발목까지 자유롭게 움직일 수 있습니다. 팔은 4개의 액추에이터와 7개의 관절로 이루어져 있습니다.
손가락은 6개의 마디로 구성되어 있어 원격 조종만으로도 물체를 쥐고 놓을 수 있습니다. 로봇에 장착된 배터리는 약 1시간 동안 지속되며, 사용하지 않을 때는 충전이 가능합니다.
발키리 사용 목적
NASA가 현재까지 주로 우주 탐사에 사용한 개발되는 로봇은 바퀴가 달린 로버 형태로 제한적인 미션 수행만 가능하였습니다. 하지만 NASA는 휴머노이드형 로봇을 개발을 통해 유인 달 탐사 프로그램 아르테미스 미션에 활용할 계획입니다. 2030년 달 기지를 설치하고 운용하기 위해 발키리가 사용될 것으로 예상됩니다. 달 기지 건설시 우주비행사를 위협하는 요소인 우주방사선이나 극단적인 온도 등을 최소화하기 위한 노력의 일환이며, NASA는 2027년까지 발키리의 성능을 입증할 계획을 가지고 있습니다.
현재 발키리는 일련의 원격 테스트를 위해 호주에 있습니다. 이 프로젝트는 호주 Perth에 있는 Woodside Energy와 체결한 우주 협정의 일부로 NASA에 발키리 원격 조작 능력에 대한 통찰력을 제공할 것으로 기대됩니다. 테스트의 일환으로 발키리는 무인 해상 에너지 시설의 원격 관리인으로 사용되고 있으며, 수집된 데이터는 NASA의 기술 개선하는 데 사용됩니다.
'TREND > 로봇' 카테고리의 다른 글
| 디지트 LLM으로 능력치 향상 (2) | 2023.12.21 |
|---|---|
| 테슬라 옵티머스 2세대 동영상 공개 (0) | 2023.12.15 |

